




















1.ACドライブ(可変周波数ドライブ)の紹介 現代の産業制御の領域では……
続きを読む
ACサーボドライブとは何ですか?
アン ACサーボドライブ のコントローラーとして機能する洗練された電子デバイスです。 ACサーボモーター 、位置、速度、トルクを正確に制御できます。比較的一定の速度で連続回転するように設計された標準の AC モーターとは異なり、AC サーボ モーターはドライブと組み合わせることで、非常にダイナミックで正確なモーション制御が可能な閉ループ システムを形成します。このため、それらは現代の幅広いオートメーションやロボットのアプリケーションに不可欠なものとなっています。
ACサーボドライブの仕組み
AC サーボ ドライブの動作の基本原理は、モータの実際の状態を継続的に監視し、必要なコマンドに一致するように出力を調整する閉ループ制御システムにあります。プロセスの内訳は次のとおりです。
-
コマンド信号受信: サーボ ドライブは、上位レベルのコントローラー (PLC、CNC、またはモーション コントローラーなど) からコマンド信号を受信します。この信号は、目標位置、特定の速度、または必要なトルクなど、望ましい動作プロファイルを決定します。
-
電力変換 (AC-DC-AC):
-
整流 (AC から DC): 入力 AC 電力 (通常は三相または単相主電源) は、まず DC 電圧に整流されます。
-
反転 (DC から AC): この DC 電圧は、インバータを使用して可変周波数および可変電圧の AC 波形に変換され、多くの場合パルス幅変調 (PWM) 技術が使用されます。この制御された AC 出力がサーボ モーターに電力を供給します。
-
-
モーター制御: ドライブは、モーターに供給される AC 電源の周波数と電圧を綿密に制御します。これらのパラメータを調整することで、モーターの速度とトルクを正確に制御します。
-
フィードバックメカニズム: 閉ループ システムの重要なコンポーネントはフィードバック デバイスであり、通常は エンコーダ または リゾルバ 、サーボモーターに取り付けられています。このデバイスは、モーターの実際の位置、速度、さらには電流 (トルクに関連する) に関するリアルタイム情報を提供します。
-
誤差の計算と修正: サーボドライブはフィードバックデータ (実際の状態) とコマンド信号 (望ましい状態) を常に比較します。両者の不一致は「誤差」として計算されます。この誤差に基づいて、ドライブの内部マイクロプロセッサは、高度な制御アルゴリズム (多くの場合、電流、速度、位置ループを含む 3 ループ制御アルゴリズム) を利用して、モーターに供給される電圧と電流を調整します。この継続的な調整により誤差が最小限に抑えられ、モーターが指令された動きに正確に従うことが保証されます。
ACサーボドライブシステムの主要コンポーネント
アン AC servo drive system comprises several interconnected components that work in harmony:
-
ACサーボドライブ(コントローラー/アンプ): コマンドを受信し、フィードバックを処理し、モーター用の正確な電力信号を生成する、操作の頭脳です。
-
ACサーボモーター: 特殊な電気モーター (通常は永久磁石同期モーター) は、高い応答性、高いトルク対慣性比、正確な制御を目的に設計されています。巻線を備えたステーターと永久磁石を備えたローターを備えています。
-
フィードバックデバイス (エンコーダー/リゾルバー): モーターシャフトのリアルタイムの位置と速度情報をドライブに提供します。エンコーダは回転を表すデジタル パルスを生成し、レゾルバはアナログ信号を提供します。
-
電源ユニット: サーボドライブに安定した電源を供給します。
-
ケーブル配線: ドライブをモーター、フィードバック装置、電源に接続します。
-
上位レベルのコントローラー: コマンド信号をサーボ ドライブに送信し、全体のモーション シーケンス (PLC、CNC など) を調整します。

ACサーボドライブのメリット
AC サーボ ドライブは、従来のモーター制御システムに比べて大きな利点があり、高性能アプリケーションに最適な選択肢となっています。
-
高精度と精度: 閉ループフィードバックシステムにより、望ましい軌道からの逸脱を最小限に抑えながら、極めて正確な位置決め、速度、トルク制御が可能になります。
-
ダイナミックなパフォーマンス: これらにより、急速な加速と減速、素早い整定時間、およびコマンドや負荷の変化に対する素早い応答が可能になります。
-
低速での高トルク: ACサーボモーターs can generate substantial torque even at very low speeds, which is crucial for applications requiring precise movements under varying loads.
-
効率: 最新の AC サーボ システムは効率が高く、大量の電気エネルギーを機械エネルギーに変換し、消費電力の削減につながります。
-
柔軟性とプログラマビリティ: サーボ ドライブは、幅広い動作プロファイルに合わせてプログラムおよび調整できるため、さまざまなタスクに適応し、システム パフォーマンスを最適化できます。
-
スムーズな操作: 高度な制御アルゴリズムにより、複雑な動きでも非常にスムーズで安定したモーター動作が可能になります。
ACサーボドライブの用途
AC サーボ ドライブは、その精度、動的性能、信頼性により、数え切れないほどの産業用および商業用アプリケーションに不可欠です。
-
産業用ロボット: 製造、組み立て、ピックアンドプレース作業におけるロボットアームとジョイントの正確な動きを制御するために不可欠です。
-
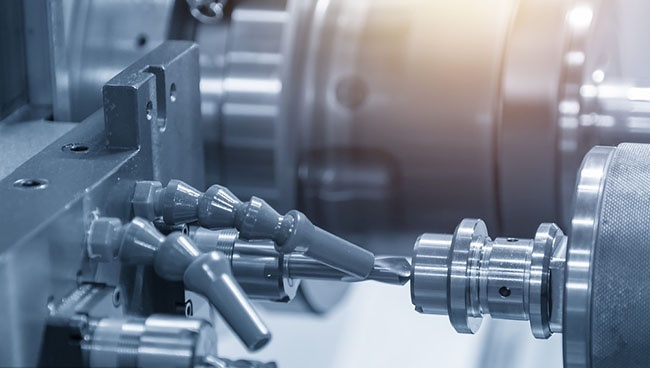
CNC マシニング センター: 金属加工、木工加工、その他の材料加工用のコンピューター数値制御機械の切削工具、スピンドル、ワークテーブルの正確な動きを駆動します。
-
包装機械: 充填・シール・ラベル貼付・仕分けなどの高速・高精度な包装ラインに使用されます。
-
繊維機械: 織機、編み機、ミシンのさまざまなコンポーネントの動きを正確に制御します。
-
印刷機: 高速印刷アプリケーションでの正確な位置合わせと正確なマテリアルハンドリングを可能にします。
-
医療機器: 正確で再現性のある動作を実現するため、手術ロボット、画像診断システム、研究室の自動化に使用されています。
-
半導体製造: 半導体製造におけるウェーハとコンポーネントの高精度な位置決めに不可欠です。
-
航空宇宙: 飛行制御システムや、正確で信頼性の高い動作を必要とするその他の重要な機構に使用されます。
-
マテリアルハンドリング: コンベア システム、無人搬送車 (AGV)、および制御された動きを必要とするその他の資材運搬装置に採用されています。
要約すると、 ACサーボドライブs は現代のモーション コントロールの基礎であり、高度に自動化された効率的な生産プロセスを実現するために必要な精度、速度、多用途性を業界に提供します。その継続的な進化により、自動化の将来においてさらに優れた機能と幅広い用途が約束されます。
前の投稿
VFDとソフトスターターの違いは何ですか?
次の投稿
VFD: 省エネとモーター制御の鍵
著作権 2024 福建雷念科技有限公司 著作権はすべて留保されています.
プライバシーポリシー  モーター制御メーカー
モーター制御メーカー